Chimères Orchestra
As a software developer at Reso-nance Numérique, I built a system to control five or more robotic drummers. As a tribe, they tap on poles in the city to create sound rhythms: an echo of human activites in primitive rhythms.
| TYPE | Art, Robotic, Software |
| DATE | |
| STACK | Pure Data, Arduino, Udoo, OSC |

Our cities are made up of materials, surfaces and textures which vibrate and produce possibilities for aesthetic and musical intervention. What would happen if we could play these surfaces and hear their shapes and sounds? What if across our cities musical robots played upon these surfaces, turning the city into a live automatic orchestra ?
Shaped like insects, Chimères Orchestra is a robotic sound installation, which is attached to metallic structures around the city. As a group, these robotic instruments form a tribe or family, and when organised together play rhythms using their spidery arms. Their sounds resonate through space, calling to passers-by, disrupting their rhythm and walk; they invite us to hit, play and explore the physicality of our urban surfaces.
The project is maintained by Reso-nance numérique. It has been exhibited around twenty times in Europe.
The problem
- The configuration must be flexible: the number of robots can be 3 or more, they can have 2 or more arms
- As a musical instrument, the rhythms must be synchronized
- Rhythms should be fast enough to have variety and loud enough to be heard
- The project could be exhibited outdoors during days
The solution
- Operate powerful motors
- Software to control and setup robots
- Mobile app to add a wireless remote
1. Secure the triggering of electric motors
To be heard, motors must have sufficient power. The first attempts damaged them and made them unusable! It took a while to find the solution, which involves securing the on/off time to allow the engine to not be turned on for a certain amount of time before it can be reactivated.
I’ve developed “PwmMotor”, a minimal Arduino library with these on/off methods:
// Motor Class to control PWM of DC motors
#include "PwmMotor.h"
// ...
void PwmMotor::on(unsigned long _current, int _pwm, int _time){
if( _current - last >= (time_on + 10) ) {
state = true;
last = _current;
time_on = constrain(_time, 0, time_on_max);
analogWrite(pin, _pwm);
if (debug) Serial.println("ON ");
}
}
void PwmMotor::off(unsigned long _current) {
if( _current - last >= time_on ) {
state = false;
analogWrite(pin, 0);
if (debug) Serial.println("OFF");
}
}This saved us a lot of motors!
2. Software to control and setup robots
The software must reflect these two use cases:
- the installation mode where the robots are playing alone according to a global clock
- the live mode where they are triggering by a musician with a remote laptop
Also, the software must handle a variety of configuration:
- 3 robots with 6 motors each
- 5 robots with 6 motors each
- 4 robots with 6 motors and 2 robots with 4 arms, as you could see above
- …
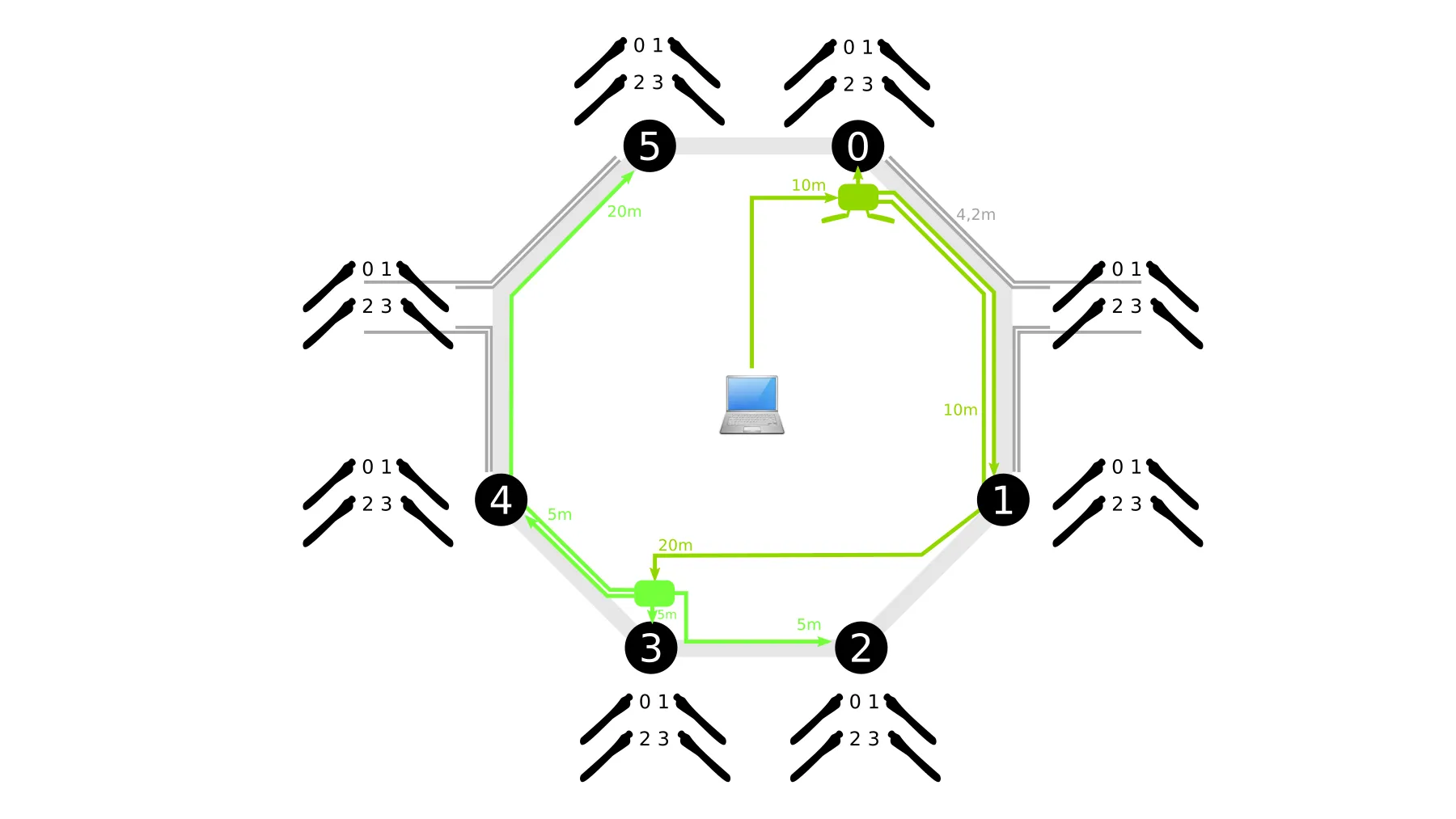
The software was written in Pure Data and could be used by the main robot controller in installation mode or by a remote laptop. It allows to create any number of robots and arms and associate them with an ID.
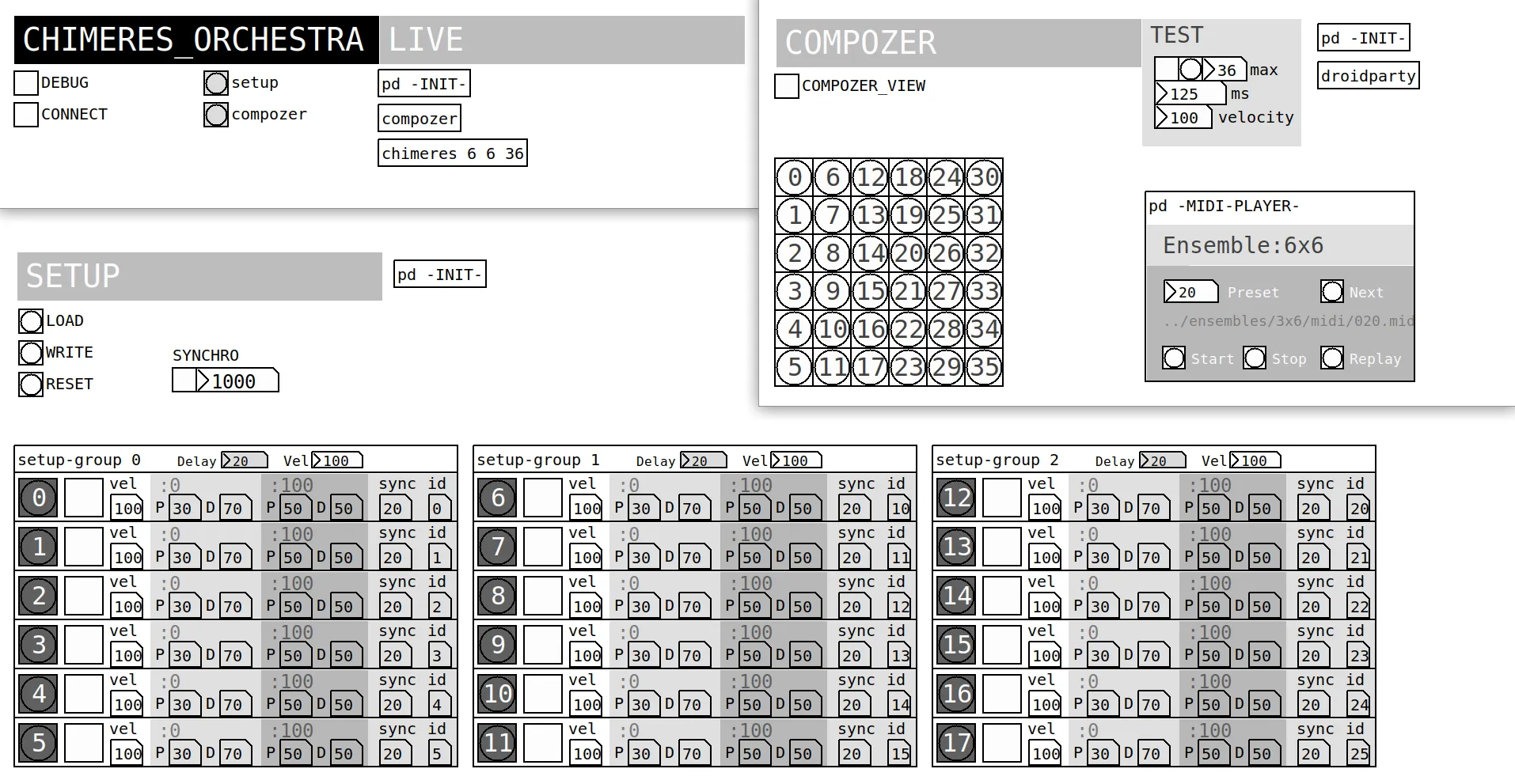
The setup process was quite complex to tune. It took years. The two main concerns was:
- the electric power of the trigger (PWM) and its duration in order to get the maximum range of musical expression: from pianississimo to fortississimo!
- the synchronization of the arms to hear clear rhythmic patterns: tutti!
3. Wireless remote with a mobile app
As robots are often placed quite high from the ground, I’ve built a mobile app with PdDroidParty. It allows easy access to robots during exhibition.

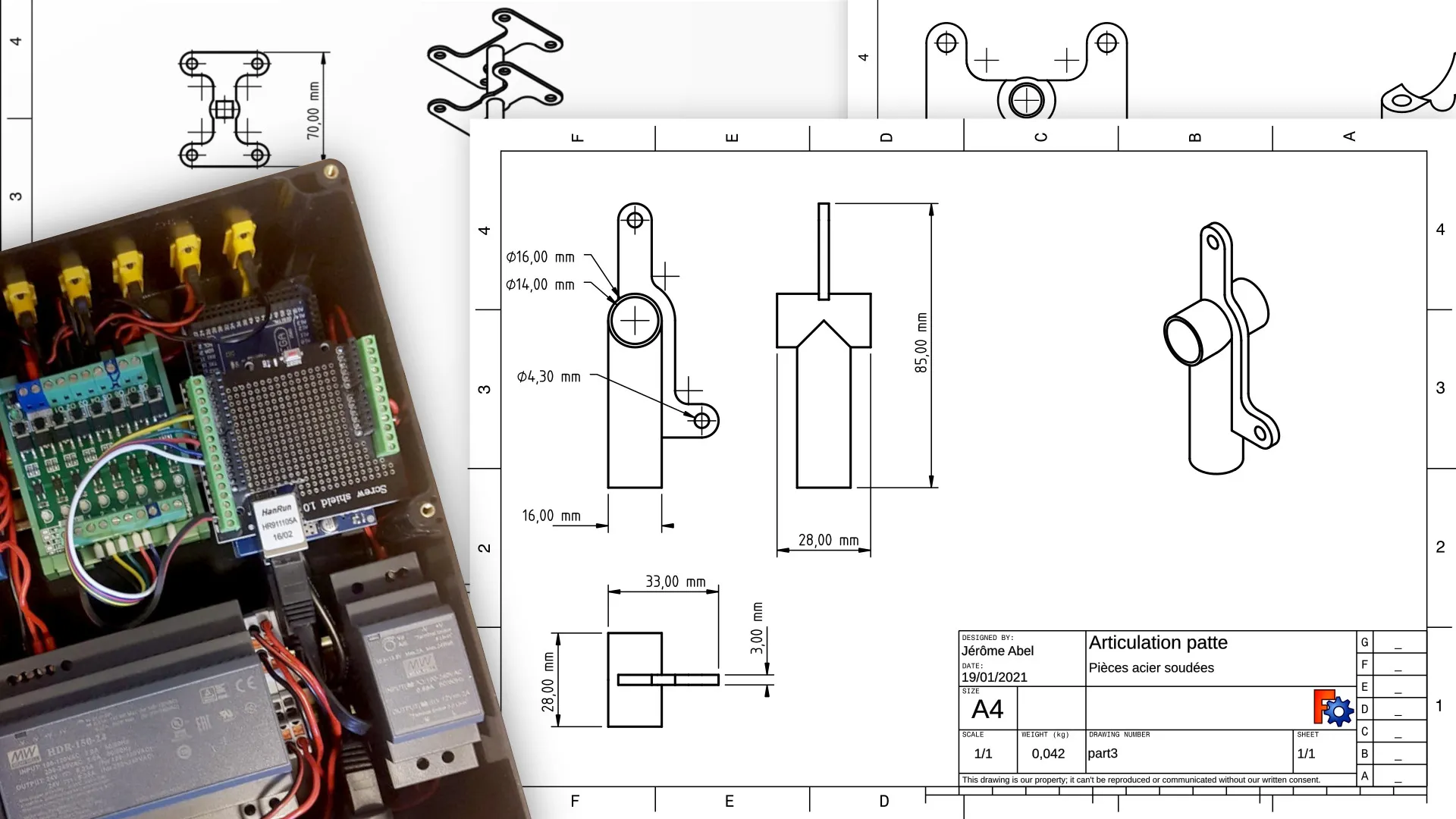
4. Hardware design
The hardware design reflects aesthetics of insects and waterproof concerns.
What I Learned
- Maintain and develop a project over 10 years! A formative journey towards quality and simplicity in fact.
- Set up a LAN network with computers, Raspberry, Arduino and mobile application
- Use FreeCAD 3D software to build metal parts
- Build waterproof electronic boxes